
| ■9月24日 テルミンに似た楽器のプログラムができた所まで昨日は書きました.第2回の講義では,普段私たちが使っている家電製品に入っているマイコンについて説明がありました.コンピュータのプログラムは1回のサイクルを実行するのに,人間の感覚で言えば,一瞬で終わってしまいます.そこで人間のニーズに合うようプログラムを作るわけですが,繰り返しの命令を無限ループで入れることになります.無限にくりかえすことで人間からすれば,いつでも反応するわけですが,電力はずうっと使わないといけないことが分かります. 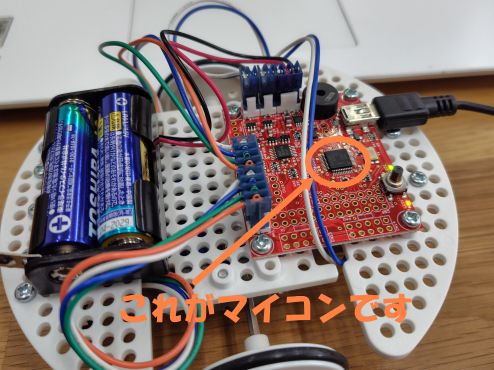 これが,コンセントをさしている家電製品にかかる待機電力なのかなぁとトムは思いました.人間にとってみれば,いつでも家電製品が反応してくれることは便利なんですけどね.リモコンを押せばライトがついたり消したりできる便利さも,裏を返せば,いつもライトのほうでは,指示が来ていないかチェックして無限にそれをくりかえしているのかもしれません.テレビもそうですね.画面がついていないのに,待機電力がかかるのは,リモコンからの指示がきていないか,光センサーからの情報を常に確認しているんだと思います.楽しいことばかりでなく,プログラミングを通してこういった日常生活の便利さの裏にかくれている家電製品のマイコン事情も学びました.先生によれば,家電製品に搭載されているマイコンも今回のロボットのマイコンもほぼ同じようなコンピュータだそうです. 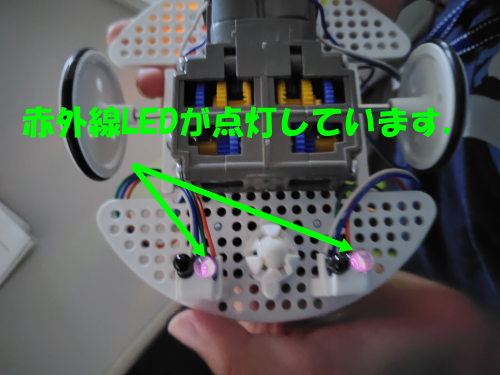 2回目の講義では,3回目の最終回に向けて,赤外線センサーのしくみも説明してくれました.上の写真はスマホで写したもので,人間には見えない光なのですが,赤外線の光が写っています. 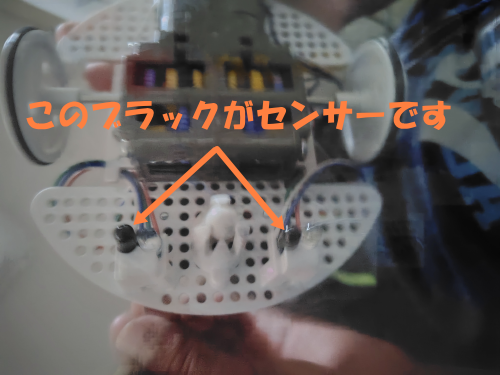 赤外線センサーは実際には2つのLEDから成っていて,ブラックのほうが本当のセンサーです.赤外線LEDを発光させて物体に当たって反射して返ってきた光をブラックのセンサーで感知します.今回のシステムでは,センサーが白の机の上にあると,光が反射して返ってきて0に近い数値が検出され,逆に黒の上にセンサーが来ると1000に近い数値がパソコン上で出ていました. これをテルミンをつくるときは, 0≦センサー1<100でド, 100≦センサー1<300でレ, 300≦センサー1<500でミ, 500≦センサー1<700でファ, 700≦センサー1でソ が鳴るようにプログラムを組んでifをつかった条件分岐型の指示を無限ループで出す指令をロボットに書き込むと,机からの高さに応じて2センチくらいでレ,4センチくらいでミ,6センチくらいでファ,それ以上でソ,机に置いたときはドという具合にロボットを持つ手の高さに応じて音色が変化していました. 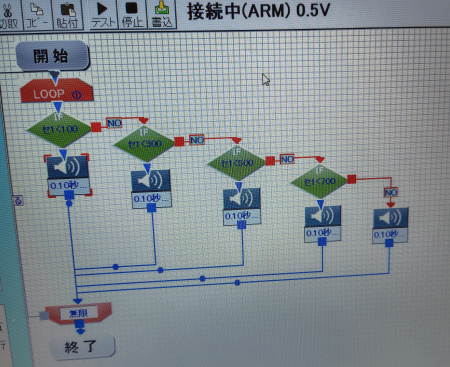 |